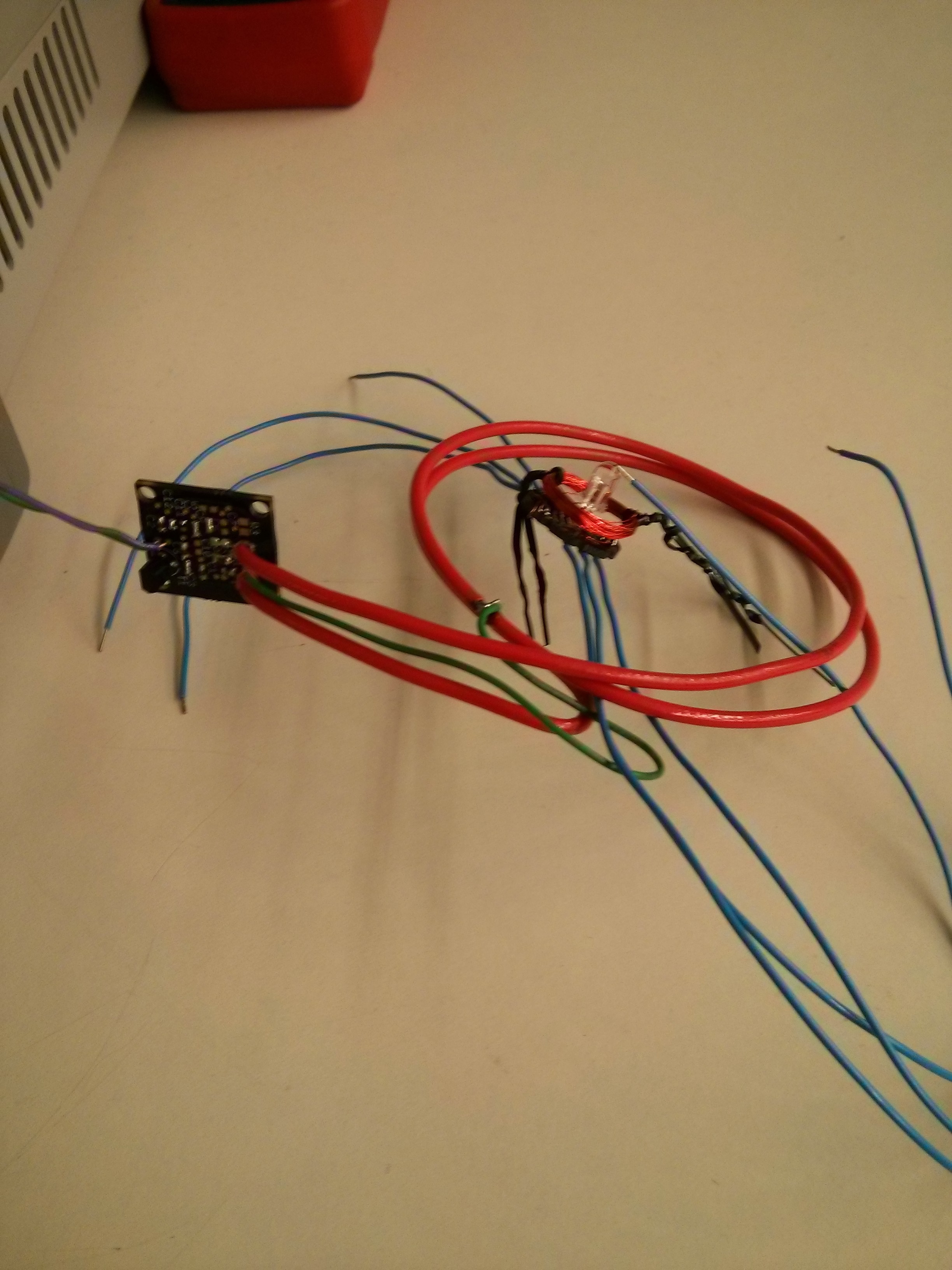
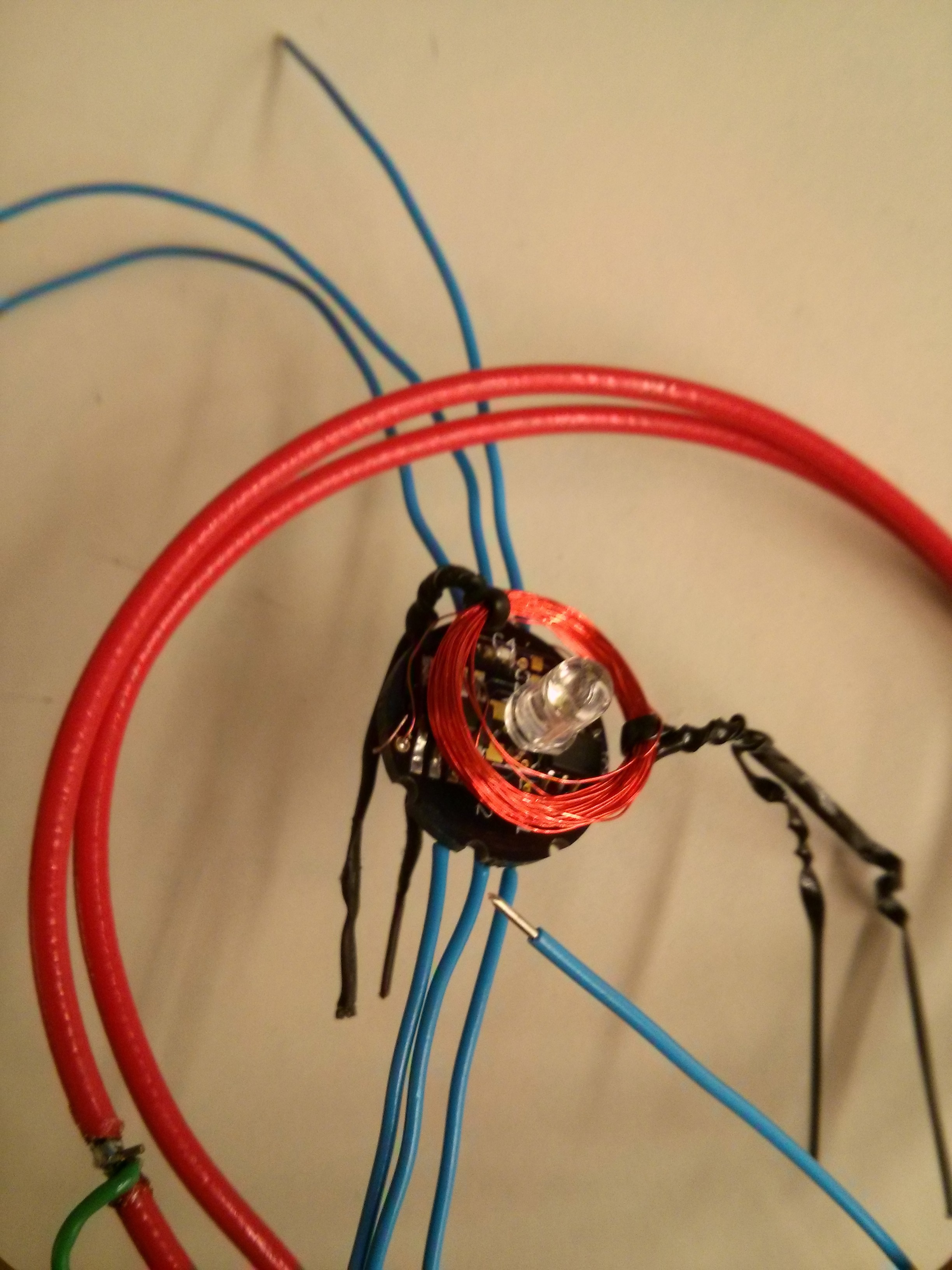
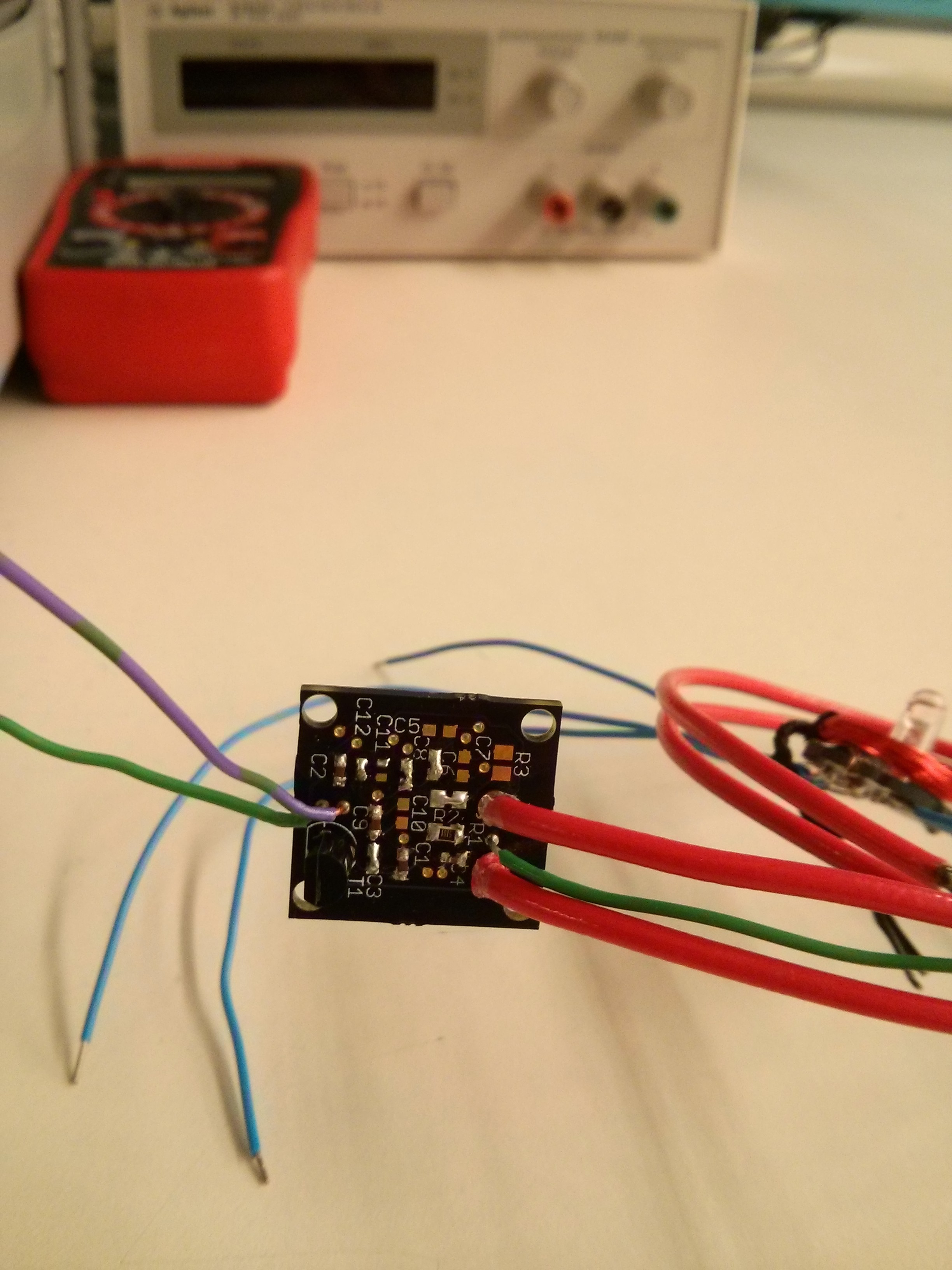
This first video shows our first successful attempt in creating a wireless power transmission circuit. We built a basic Colpitts oscillator to generate a sinusoidal current through the inductive power transfer coil. The alternating current then generated a magnetic field that is picked up by the receiving coil and turned back into current. For our load we are simply using an LED in parallel with a capacitor. The capacitor is used to cancel out some of the parasitic inductance of the receiving circuit.
In this second video we succeeded in transferring a high enough amount of energy to be able to power a rectifier circuit, an ATtiny13 micro-controller, and our infrared LED. This is a major step forward since this was the crucial factor that could have greatly set us back in regards of chess piece identification. Below is a video of our first successful demonstration of our wireless power transmission circuit
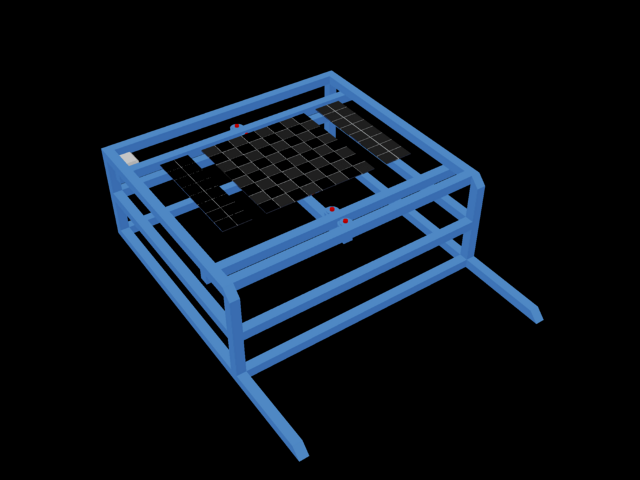
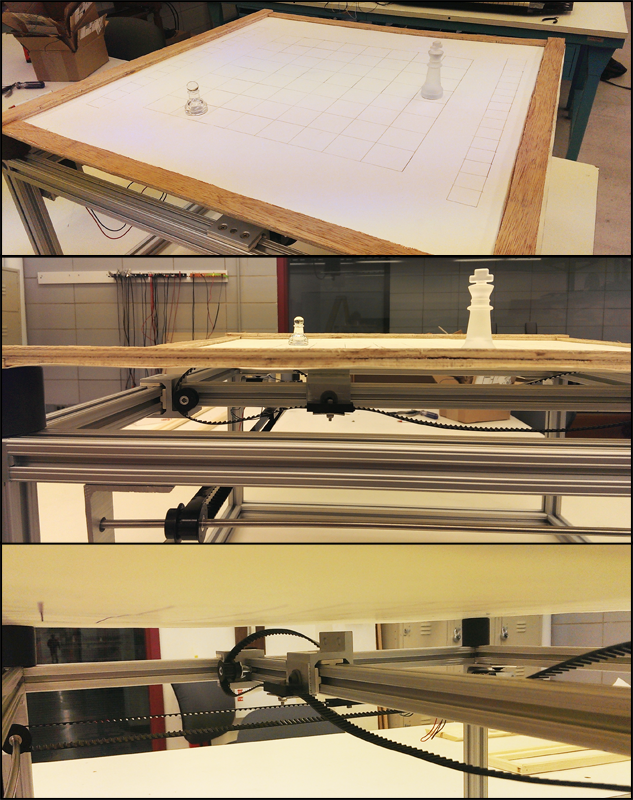
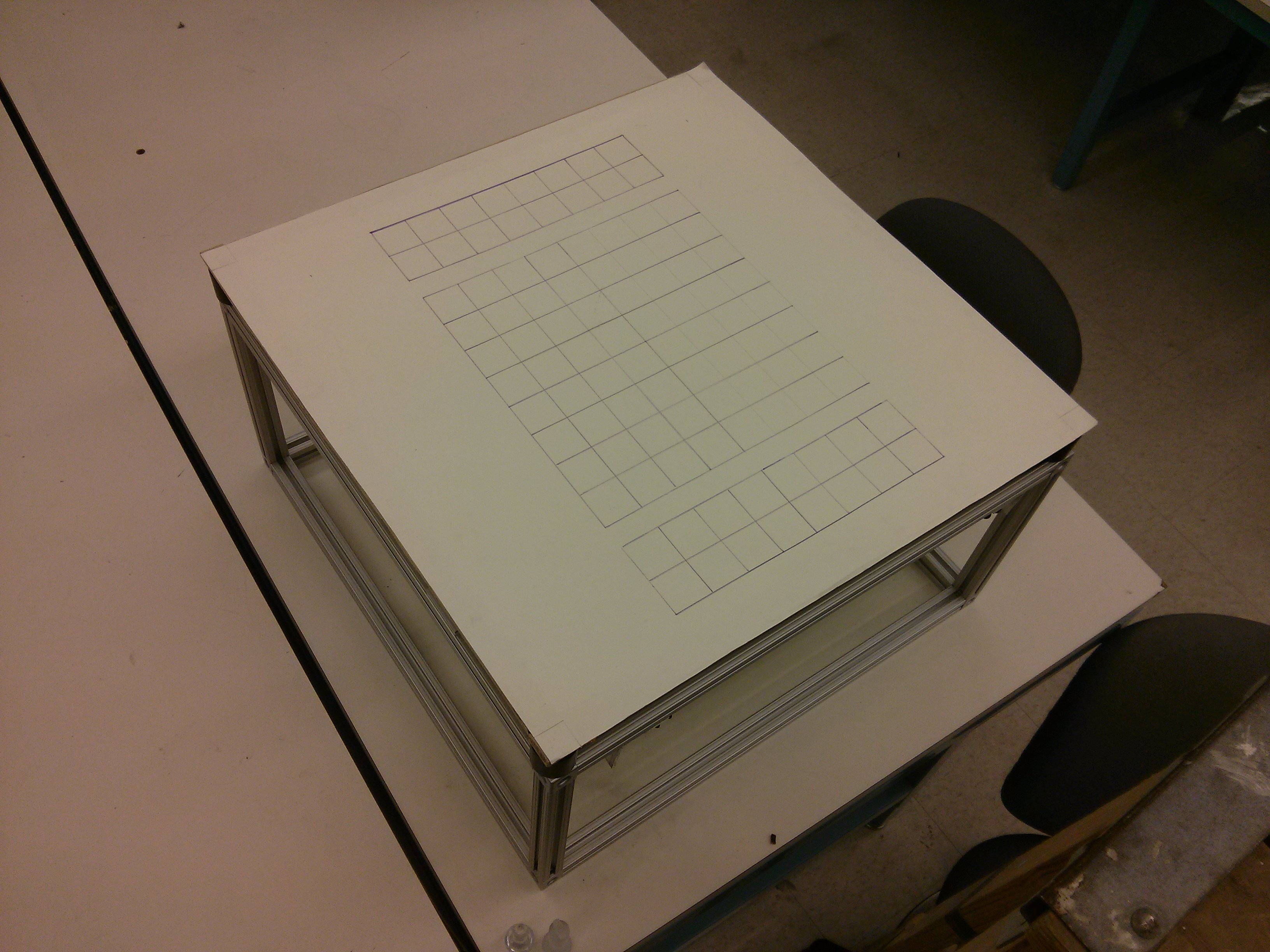
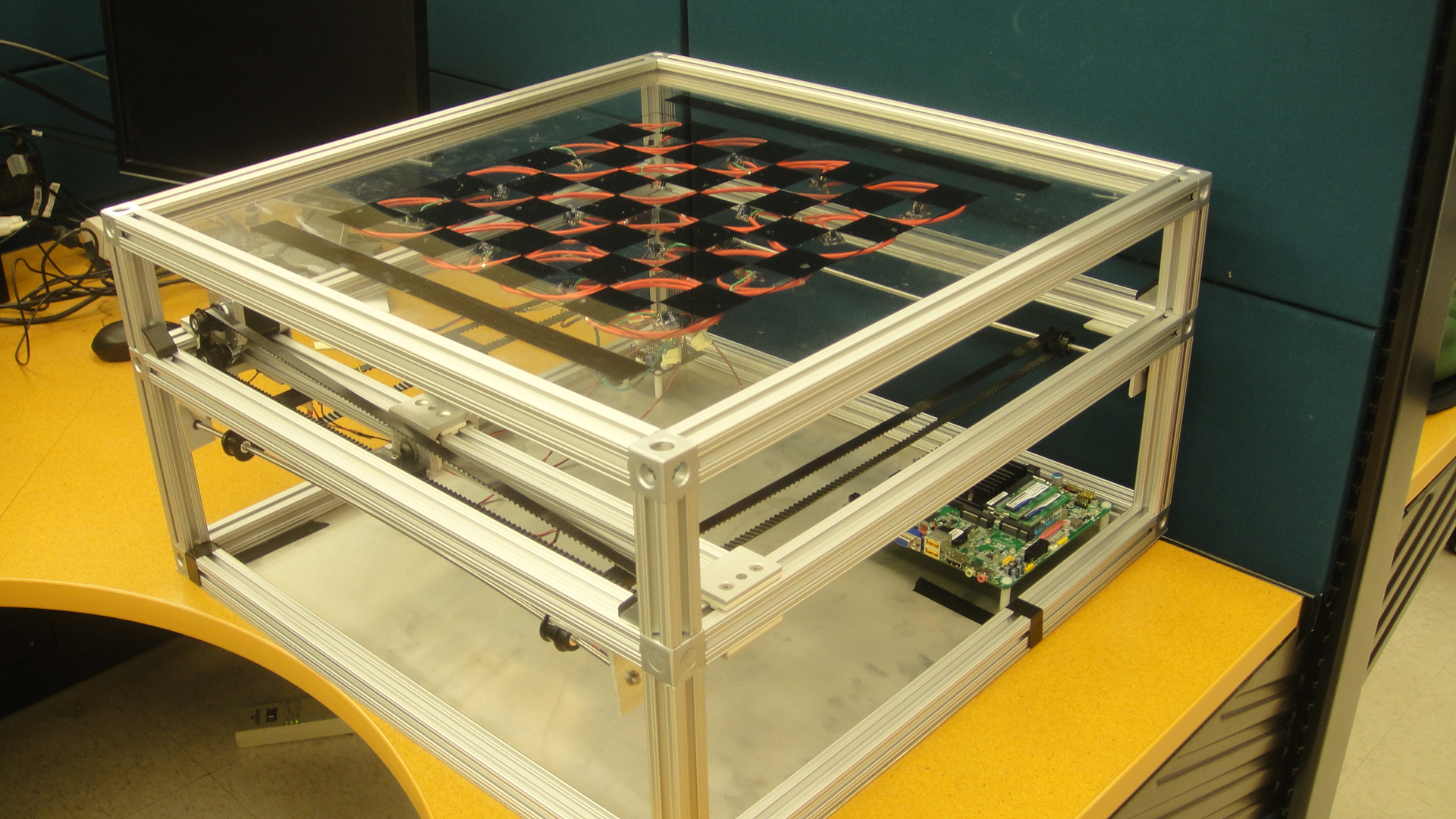
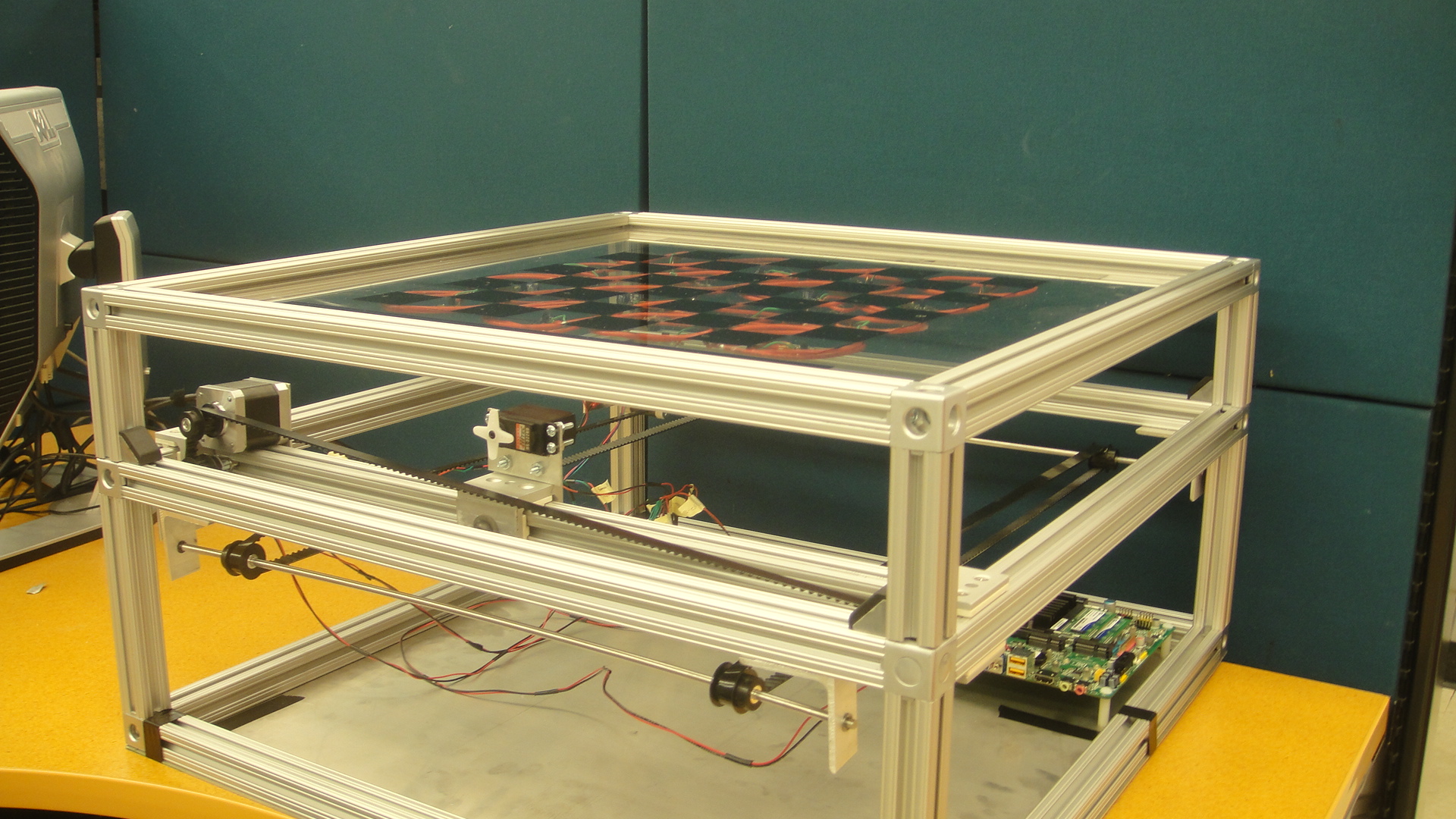
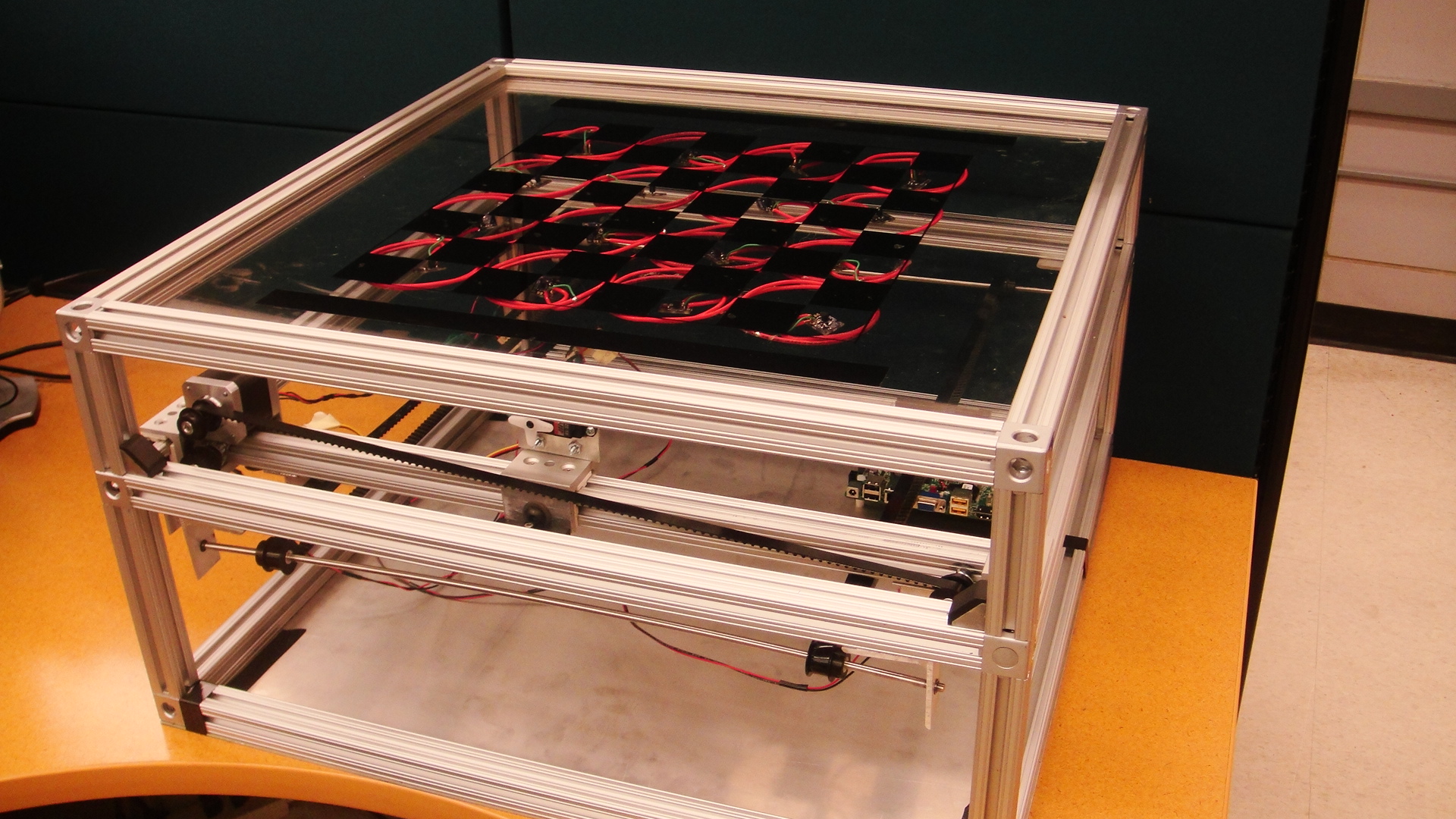
On the left is our CAD rendering of the early version for the chess board frame. The chess board is included on the top to give a sense of scale. The frame will be constructed of 80/20 extruded aluminum. The legs on the front portion are extended to be able to accommodate a piece of sheet metal at a 45 degree angle in which we will mount the touch screen. The design consists of two levels. The top level will contain the parts necessary to move a magnet that will be used to move the chess pieces. The bottom level will contain all of the electronics and power supply for the chess board.

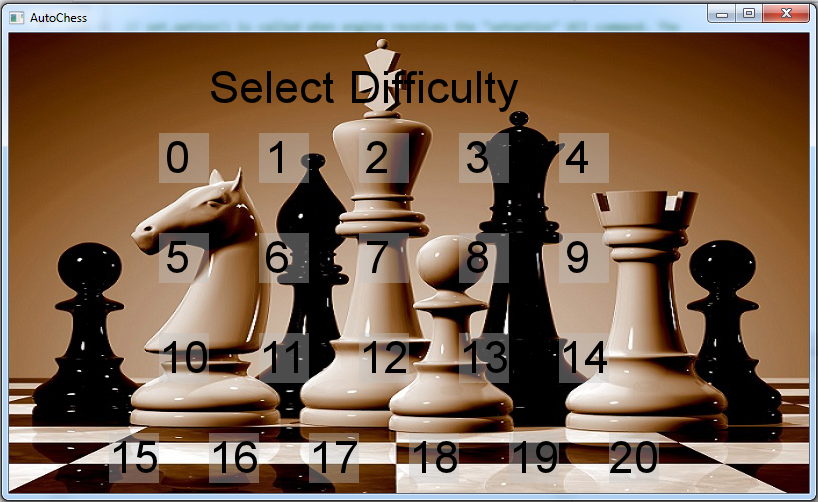
The next couple of pictures are concept images for our user interface. The first picture is for the initial start screen for the chess board. The second image is what the screen will look like when a game is in progress.

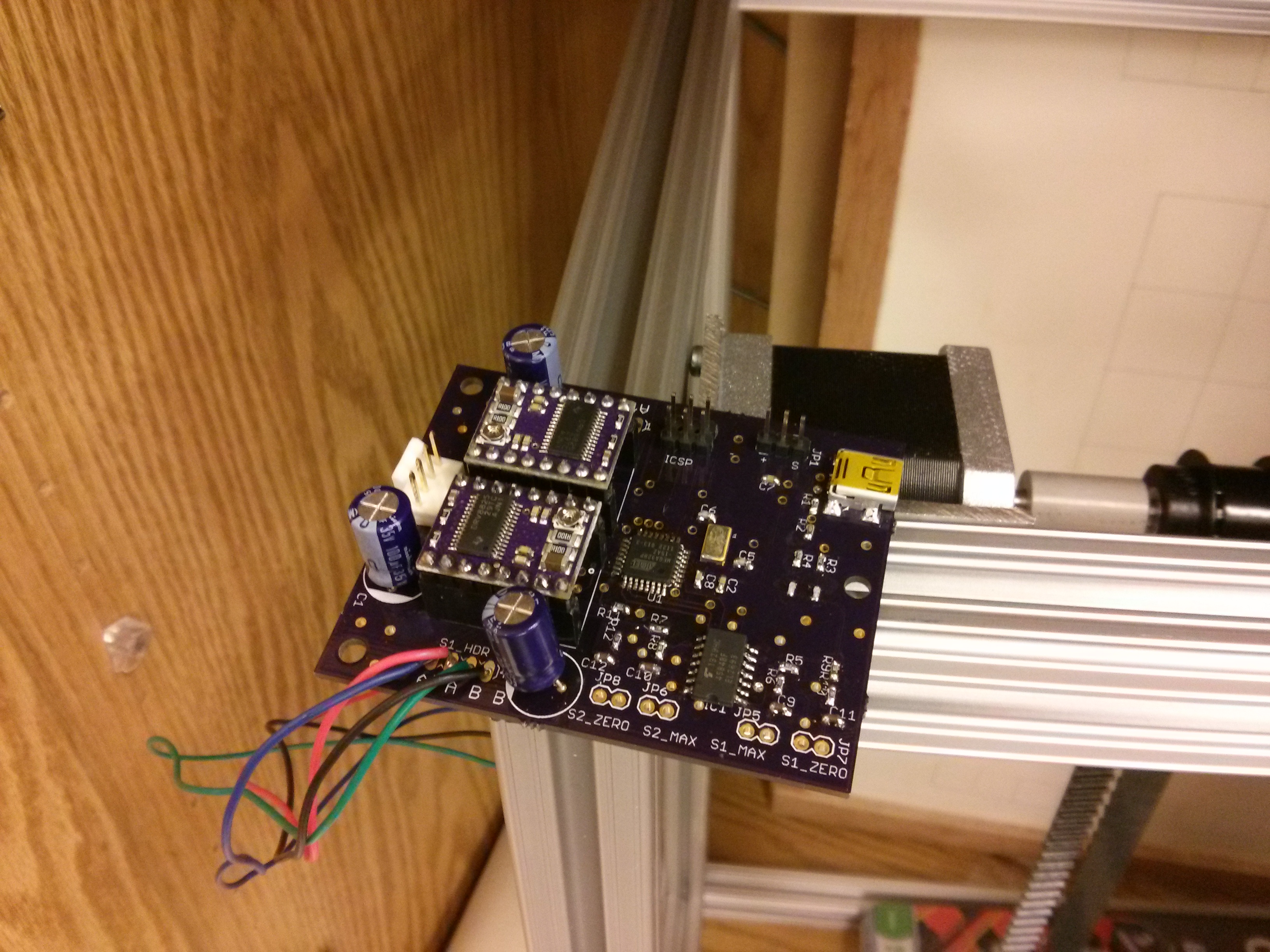
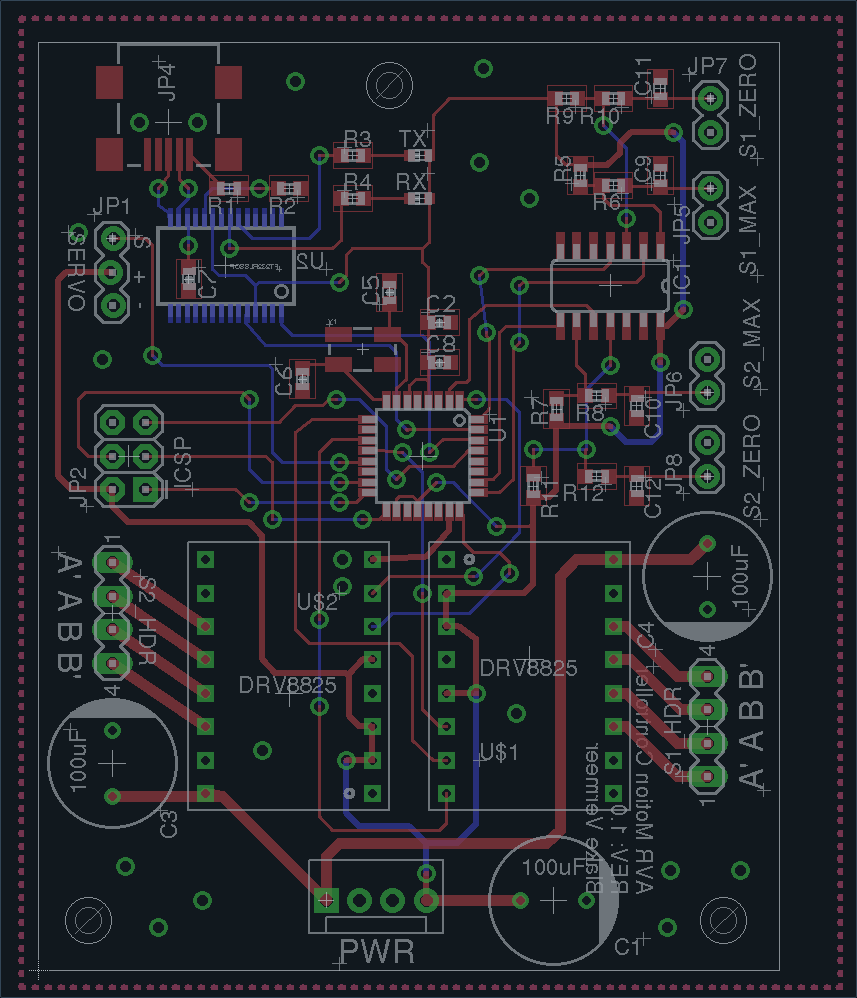
This first video shows the motion controller circuit prototyped out on a breadboard and an early version of the firmware running on it.
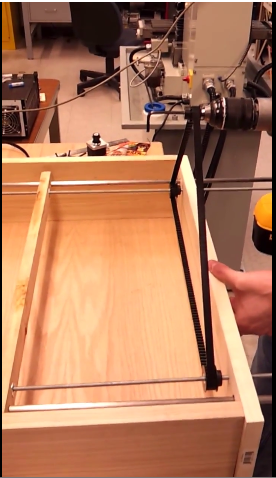
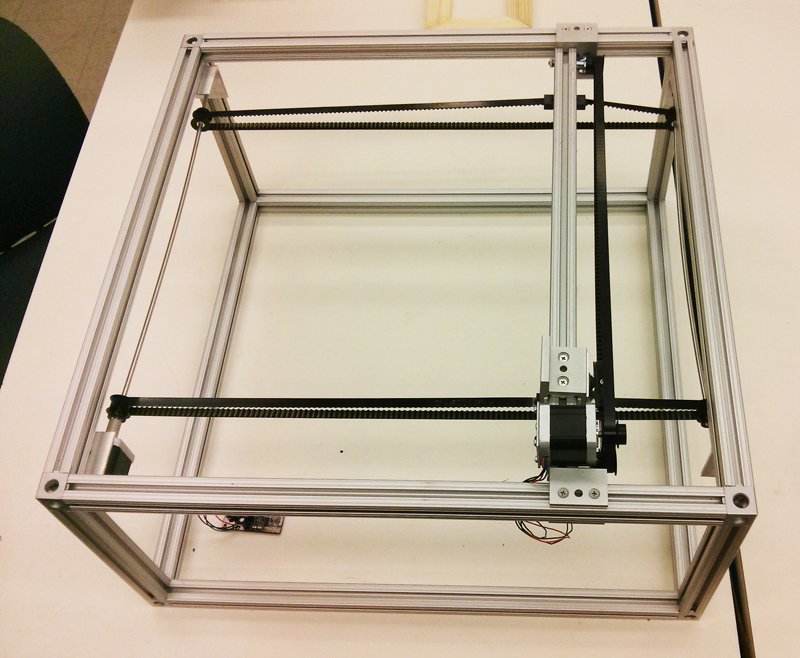
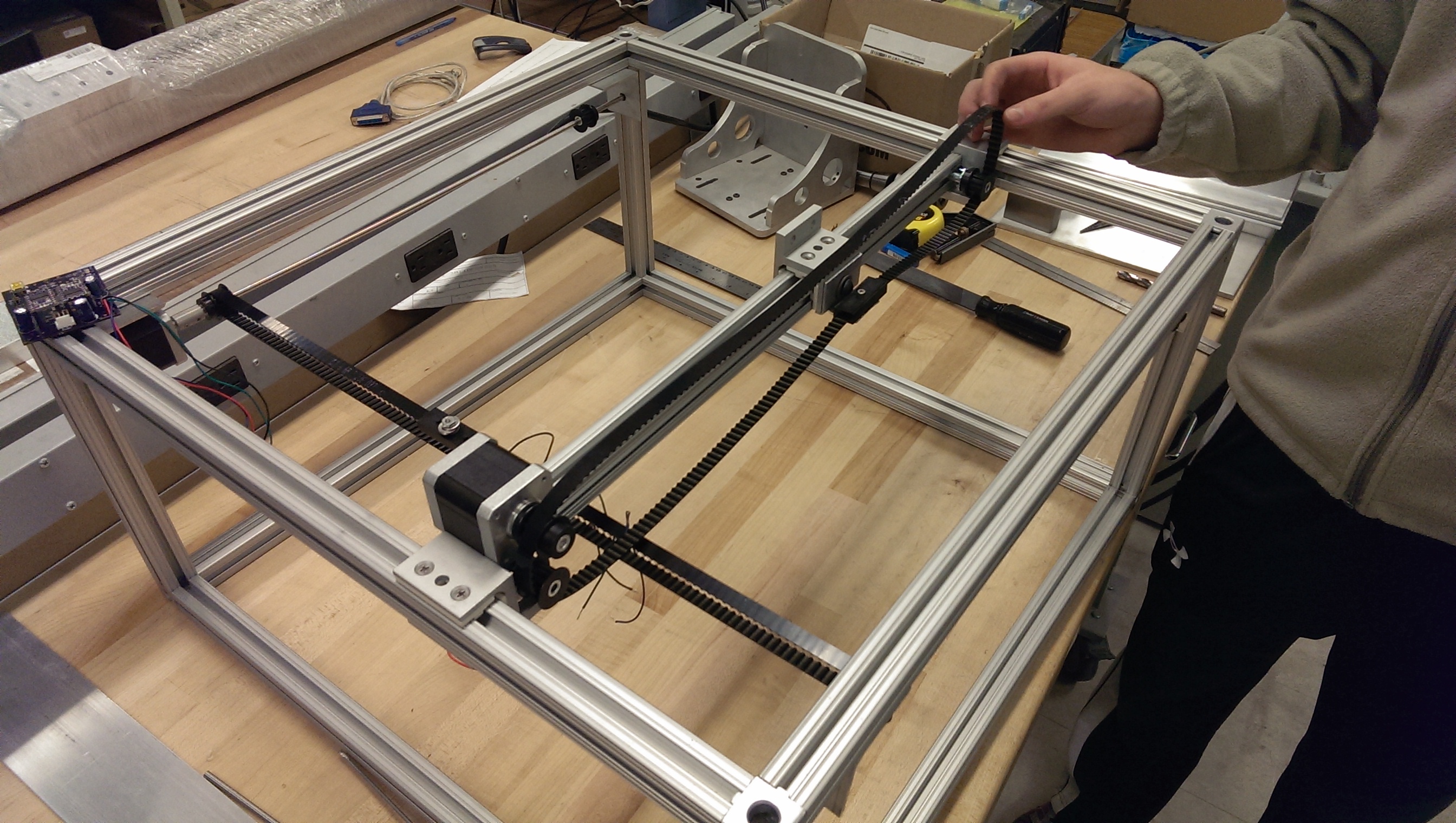
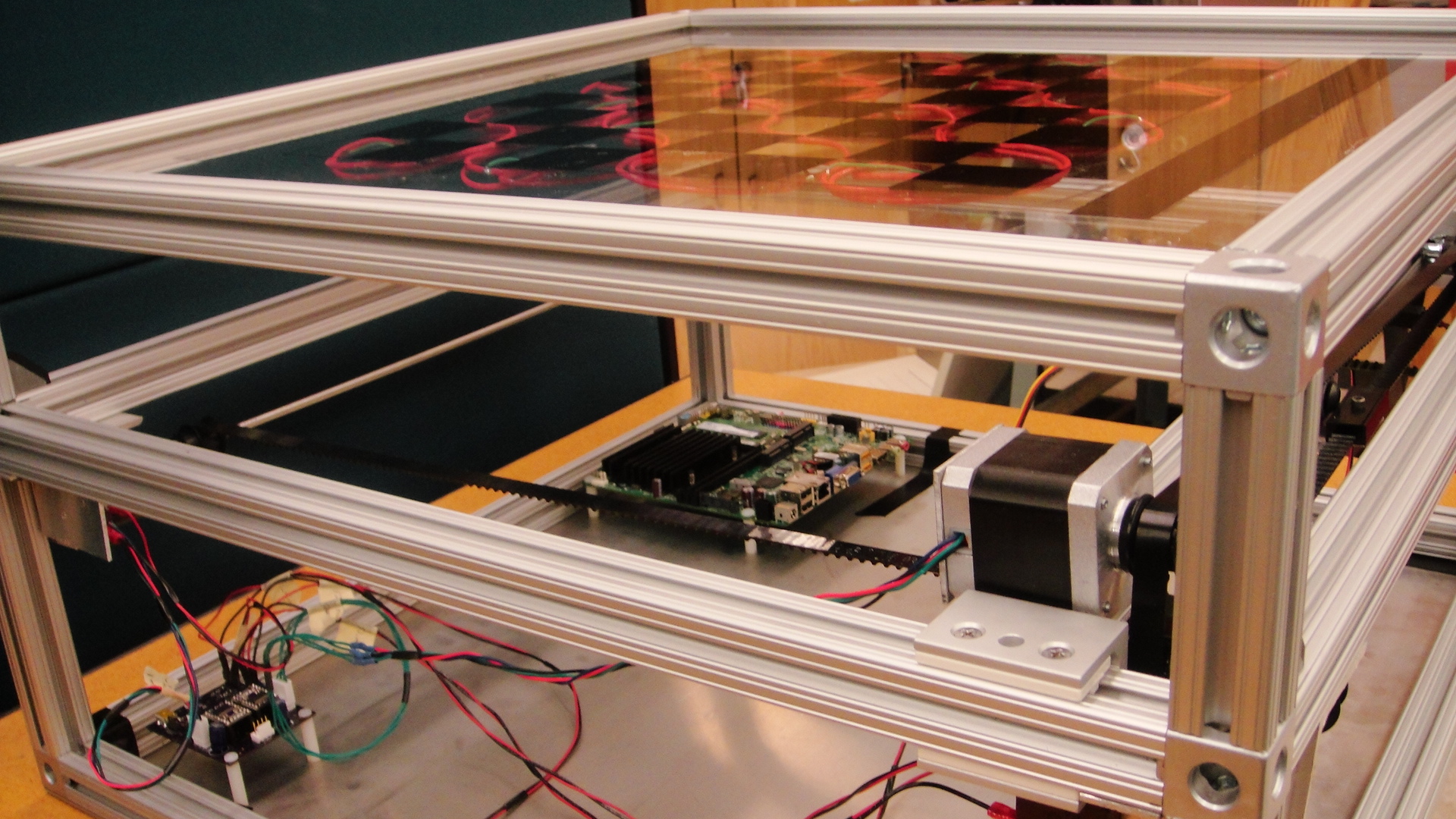
In this second video we successfully tested the motion controller on with the frame for the first time. It had some initial hiccups but eventually it starting working! The main problems shown in this video are trying to ramp up the speed of the stepper motors too quickly and limit switch not being implemented yet.
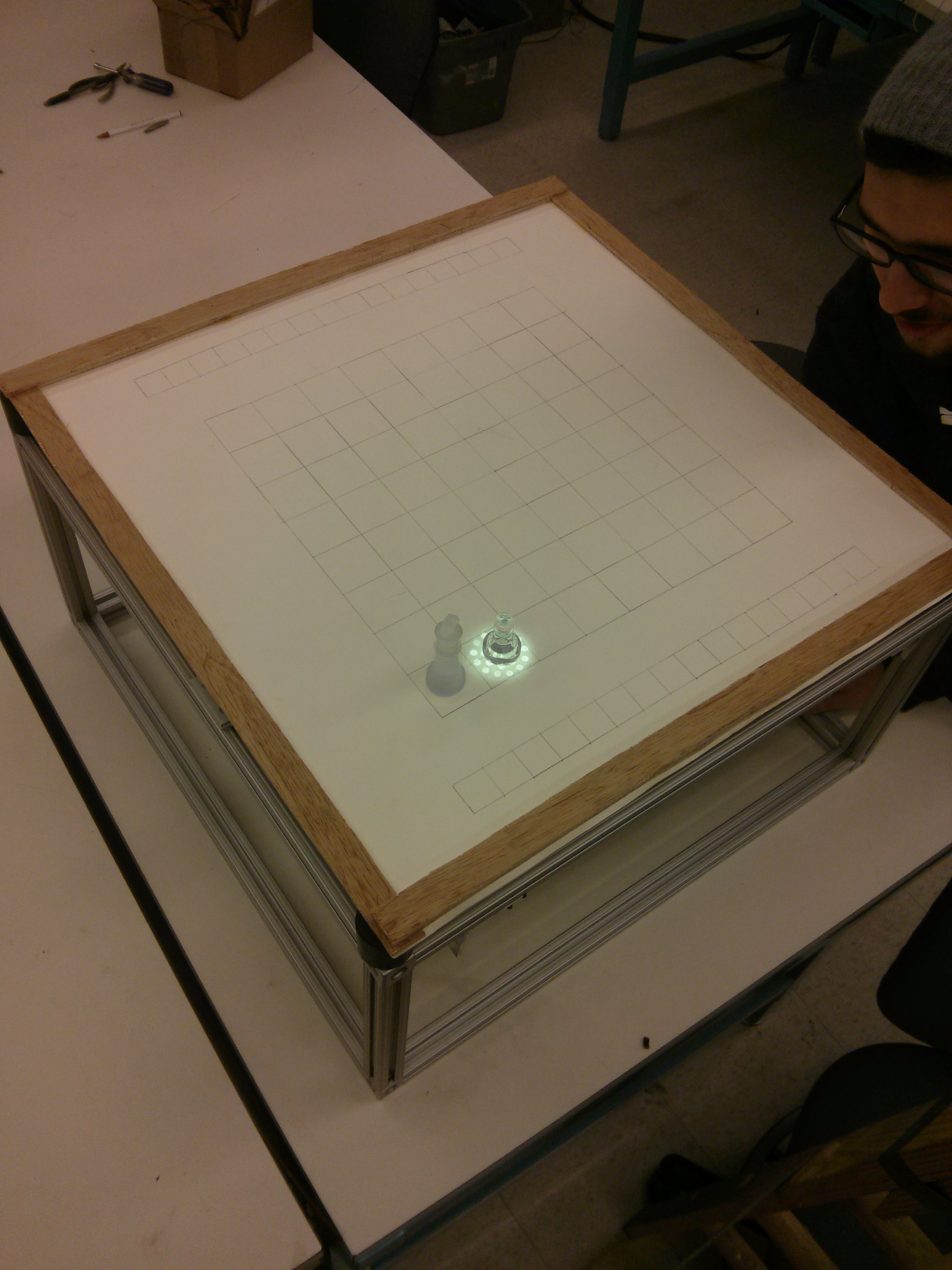
In this video, we used the motion controller to move a piece around the board.
In this last video, we integrated the motion controller with a simple application we made to test the interface between the motion controller and the computer. In this video, we had not perfected the positions for the squares yet so that is why the position is a little off.
Copyright (c) 2013 Team AutoChess All rights reserved. | Iowa State University | Webpage Devs - Matt Dresser & Blake Vermeer | Base CSS by FreeCSSTemplates.org.