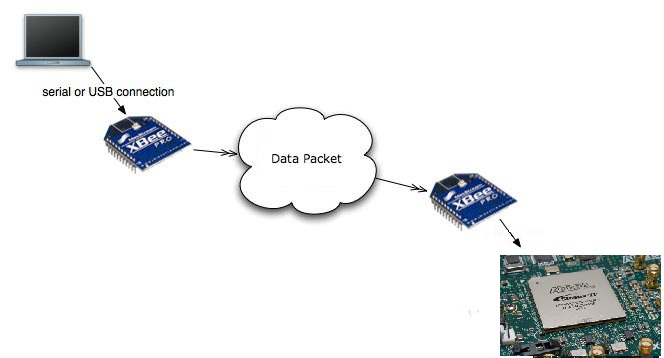
Bluetooth communication using a Bluetooth XBEE module is our means of communicating with the quadcopter from the base station. We send the position data from the camera system and we send current commands from the interface. Most of the receival code is located in the c file called helloworld.c.
We had come across a couple of difficulties working with the bluetooth modules. One of these difficulties was that packets would either be dropped or broken. After observing broken packets and odd behavior, we implemented start bytes to ensure the data does not get off the mark on a missed byte. We later implemented a cyclical redundancy check on the board to ensure it received exactly what was sent by the basestation.
Bluetooth XBEE module
To utilize wireless communication functionality, we have two XBEE Bluetooth modules that communicate through UART. We are using the first module to send the position data and commands from the base station to the second module located on the LABET FPGA board.
Inputs\Outputs: Position data from camera system and commands from interface
Baud rate:
Interface: Base station GUI